“潜龙二号”圆满完成西南印度洋试验性应用任务
2016-03-12 16:22:24|来源:中国网|编辑:杜军帅
中国网西南印度洋3月10日讯(特派记者 葛蕾 通讯员 刘健)当地时间3月4日13时43分,随着“潜龙二号”(自主水下机器人)在“向阳红10”船后甲板缓缓落下,中国大洋40航次第二航段“潜龙二号”的试验性应用任务圆满完成。本航段,“潜龙二号”取得了多项突破性成果:这是我国自主研制的AUV首次大面积执行洋中脊热液区大洋探测任务;获得龙旂、断桥、玉皇热液区共计200多平方公里的近海底精细三维地形地貌数据、近海底磁力数据及其它多种探测传感器数据;发现了多处热液异常点,这是我国大洋热液探测的重大突破。
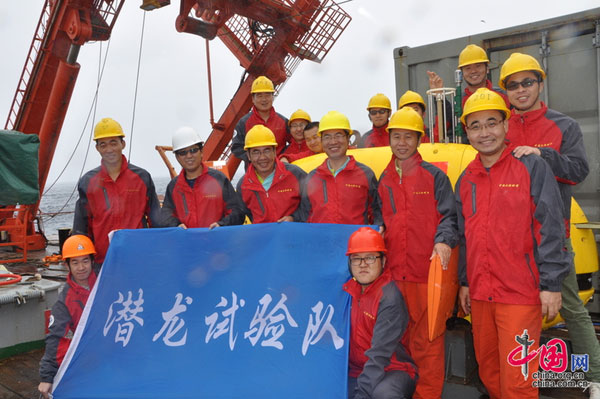
潜龙试验队全体人员合影(摄影 葛蕾)
“潜龙二号”在本航段中工作稳定可靠,表现出色。在共8个潜次的任务中,它完成了7个长航程探测任务,累计航程近七百公里,探测面积超过我国以往任何深海AUV的探测面积。其中龙旂3个长航程潜次均一次成功,断桥4个潜次有3个长航程潜次成功,玉皇1个长航程潜次成功,探测数据均完整有效。其中单次下潜最大工作时间达到32小时13分钟,最大航行深度超过3200米。连续4个长航程成功探测成绩也创下了我国深海AUV之最。
西南印度洋脊上热液活动区的分布基本上与洋脊、断裂和火山活动带密切相关,多分布在洋脊的翼部、断层崖、深海丘和海底火山高地等地形上。西南印度洋热液区地形极为复杂,热液区试验海域海底地形起伏最大高达1700米。对于完全自主的水下机器人来说,要在如此复杂的地形条件下实现大面积近海底探测,难度可想而知。由于在第一航段的验收试验中,试验队及时有效地解决了出现的问题,逐渐完善了潜水器的状态,吸取了宝贵的经验和教训,因此在第二航段的试验中,“潜龙二号”工作非常稳定,表现出良好的近海底复杂地形条件下的稳定航行能力和出色的避碰控制性能。在龙旂热液区的单次下潜探测中,“潜龙二号”就有效地完成数十次规避障碍的控制。“潜龙二号”出色的航行及避碰性能,为其安全、可靠地完成探测任务奠定了基础。

AUV布放(摄影 葛蕾)
近海底精细地形地貌探测是“潜龙二号”的一项重要功能。“潜龙二号”首次采用测深侧扫声纳水下实时信号处理技术,获得热液区200多平方公里的近海底精细三维地形地貌数据,实现了深海近海底高精细地形地貌快速成图。
热液活动区热液异常探测是“潜龙二号”的另一项重要功能,它是发现热液活动区,进而找到热液活喷口的重要手段。“潜龙二号”装载有CTD、氧化还原电位计、浊度计、甲烷传感器、磁力仪等重要探测设备,能够探测到热液活动区的热液异常。在本航段试验中,潜龙二号成功发现多处热液异常,为今后的进一步探测及科学研究提供了重要依据。
在本航段“潜龙二号”应用性试验过程中,全船的调研队员表现出了同舟共济、团结协作、不怕疲劳的优良作风,在有限的时间里,航段领导周密安排、科考队员日夜奋战,终于完成了航次计划中规定的本航段的探测任务,同时取得了多项探测成果,这份荣誉归功于“潜龙试验队”,归功于全体调研队员,也归功于始终给予我们支持和帮助的各级领导和同志们。
本航段试验再次验证了“潜龙二号”的多项创新性技术:首次采用全新非回转体立扁形设计和推进器布局,增强了潜水器的机动性能,实现了复杂海底地形下的稳定航行和路径跟踪;首次采用基于前视声纳的避碰控制方法,大大提高了障碍物的有效识别能力,实现了复杂海底地形条件下的有效避碰控制;在AUV上安装了磁力探测传感器,解决了对磁辐射设备的屏蔽和磁探测数据的校正及处理难题,实现了近海底高精度磁力探测,属国内首创;采用测深侧扫声纳水下实时信号处理技术,实现了深海近海底高精细地形地貌快速成图。
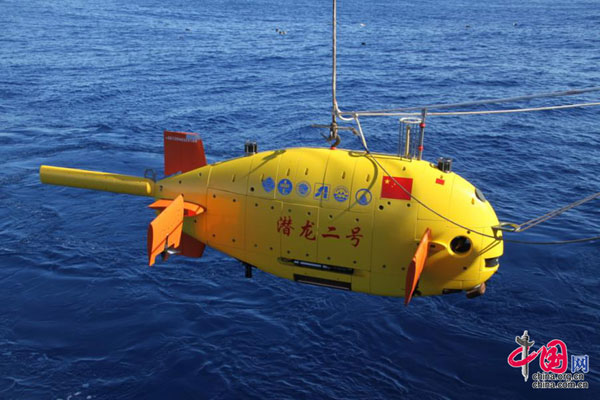
AUV入水(摄影 葛蕾)
“路漫漫其修远兮,吾将上下而求索”。大洋40航次第二航段“潜龙二号”西南印度洋试验性应用的结束,标志着其在大洋40航次的任务圆满完成,同时也是未来投入大洋实际应用的开始。热液硫化物矿区的探索之路还很漫长,还有许多未知海域等待我们去探索,还有许多新的挑战等待我们去面对。随着“潜龙二号”的横空出世,未来我国深海硫化物矿区的调查装备将会增加一项利器,为我国的海洋强国蓝图增添浓墨重彩的一笔!(刘健系“潜龙二号”总设计师)













 京公网安备 11040202120016号
京公网安备 11040202120016号
